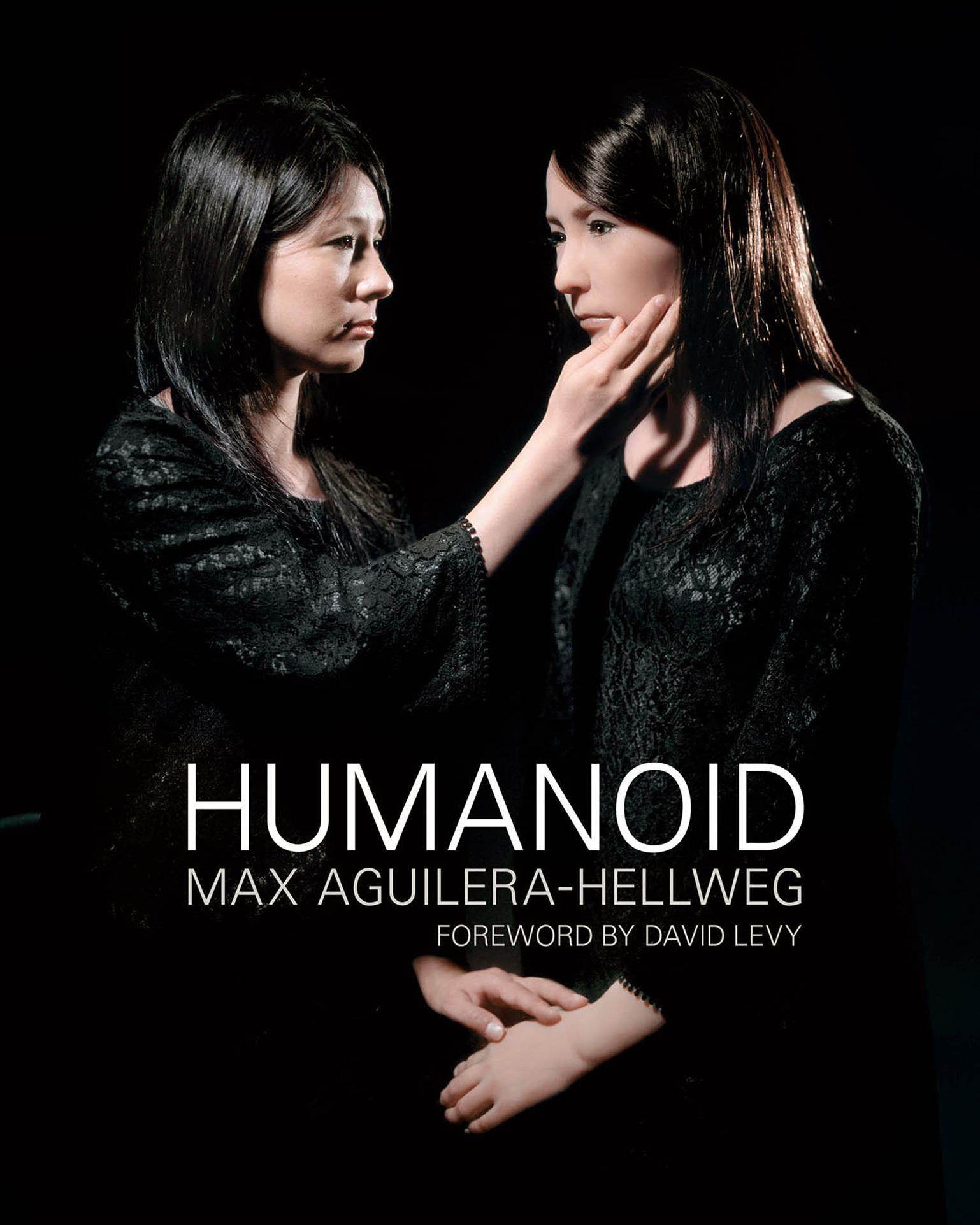
Posterior view, exposed spine, Actroid-DER1, an android robot modeled after a generic Japanese woman, capable of human-like expression and speech through telepresence (a person in a remote space controlling robot movements, and conversing as the voice of the robot) for the purpose of rental to the general public for use as a host or guide. Manufactured by Kokoro Company Ltd, of Japan, this Actroid-DER1 was made temporarily on loan to the Emerging Media Graduate program at Carnegie Mellon University for the purpose of enhancing its human characteristics.

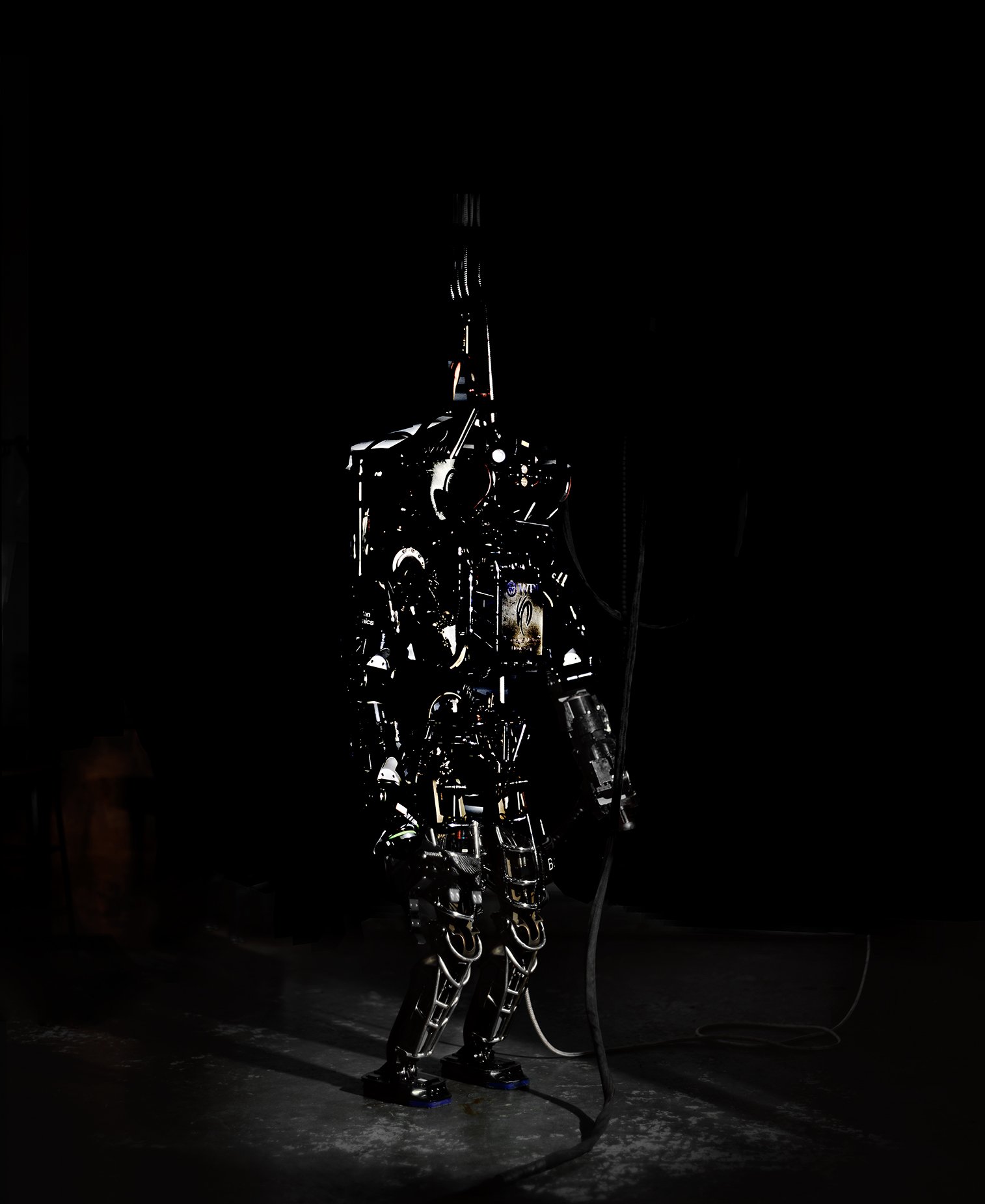
Biobiped1 is a biologically inspired musculoskeletal two-legged humanoid built by engineers with the aid of an anatomist with the goal of achieving a humanlike gait when walking and jogging. Bioped1’s legs mimic the human muscle-tendon groups of the lower limb using elastic (non-motorized) actuators (robot motors) tied to cables and springs in combination with actual “motorized” electric actuators.

Experiment testing the hypothesis, can you build an android fetus and measure such parameters as pressure and torque to study medical issues of premature birth such as underdeveloped lungs.






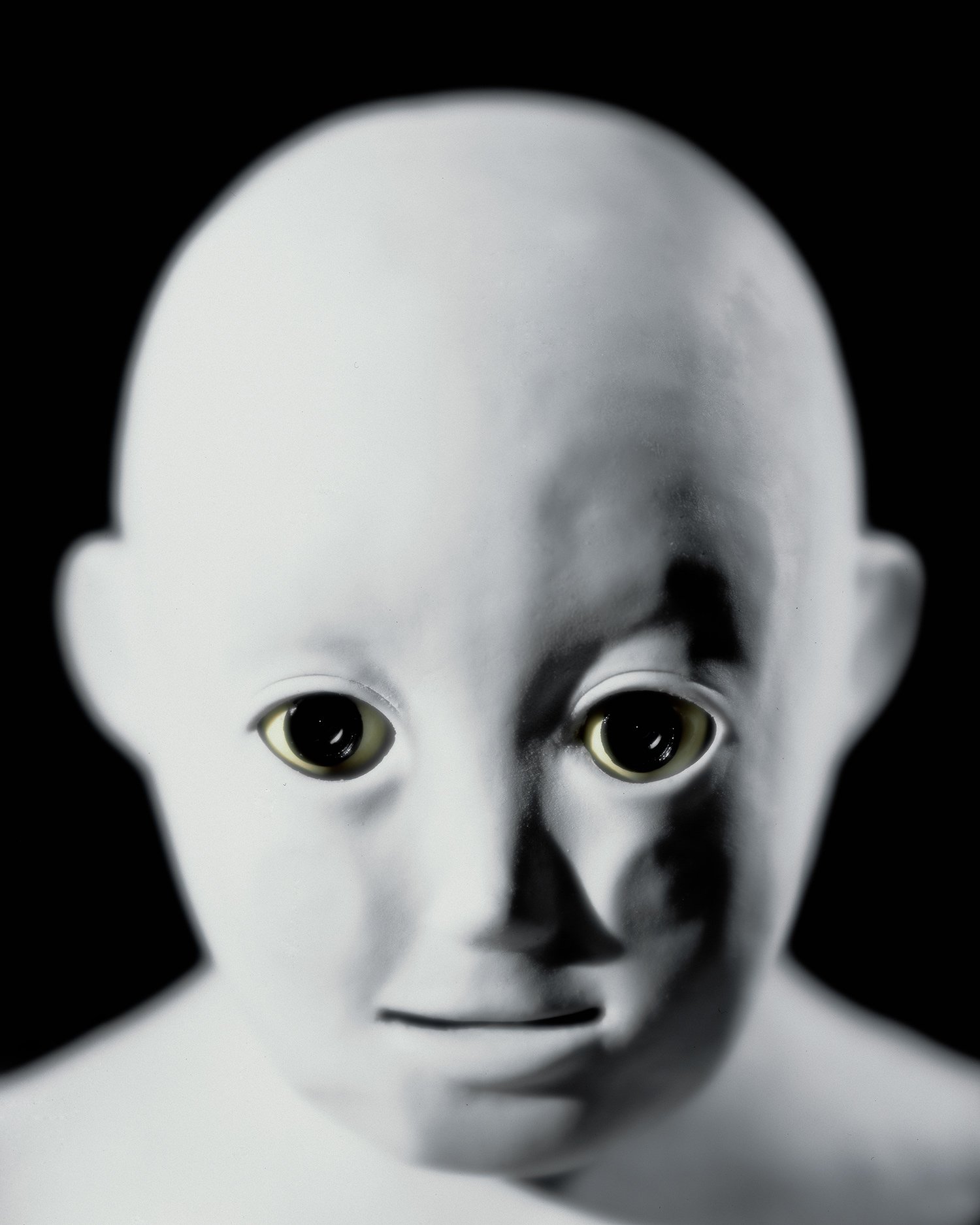
CB2, a 4’3” infant robot built for human-robot interaction, with tactile and other bio-like sensors throughout its android architecture and silicon skin; actuators (motors) and related devices capable of movement was an early experiment in artificial intelligence human-robot interaction, a research study that asked the question how do robots learn.


CB2’s teather cord with power, sensory data cables, and other data and control lines.
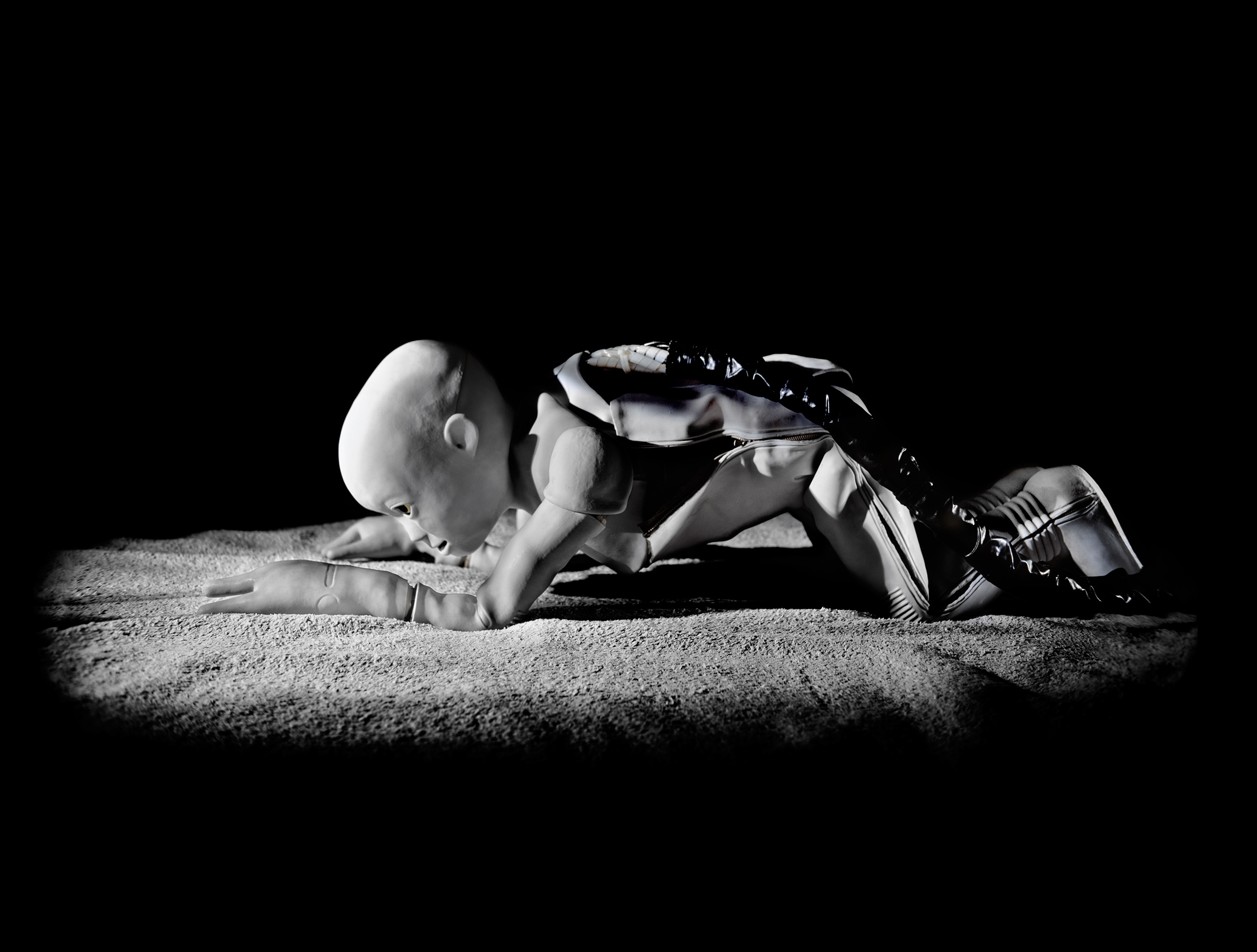
Learning to crawl is a basic first step in human learning, this was an initial question of the Asada lab, could they teach CB2 to crawl? To their surprise, what the data revealed was a detailed analysis of how humans teach infants to crawl, the caretaker-infant interaction, ie, that robots could be used to teach us about ourselves.